
Understanding SLAM and Its Challenges
SLAM (Simultaneous Localization and Mapping) is a crucial technology in robotics and computer vision. It enables machines to determine their location and create a map of their environment. However, motion-blurred images pose significant challenges for dense visual SLAM systems:
1. Inaccurate Pose Estimation
Current dense visual SLAM methods depend on clear images for accurate camera position estimation. Motion blur disrupts consistent brightness across views, leading to errors in mapping.
2. Inconsistent Multi-View Geometry
Poor image quality can result in incorrect features, causing inaccuracies in 3D geometry and low-quality maps. Consequently, existing dense SLAM systems struggle with motion-blurred images.
Advancements in SLAM Techniques
Traditional sparse SLAM methods use sparse point clouds for mapping. Recent learning-based dense SLAM systems, like Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS), focus on creating detailed maps for better results in various applications. However, these methods require high-quality RGB-D inputs, which are challenging to obtain in low-light or long-exposure conditions.
Introducing MBA-SLAM
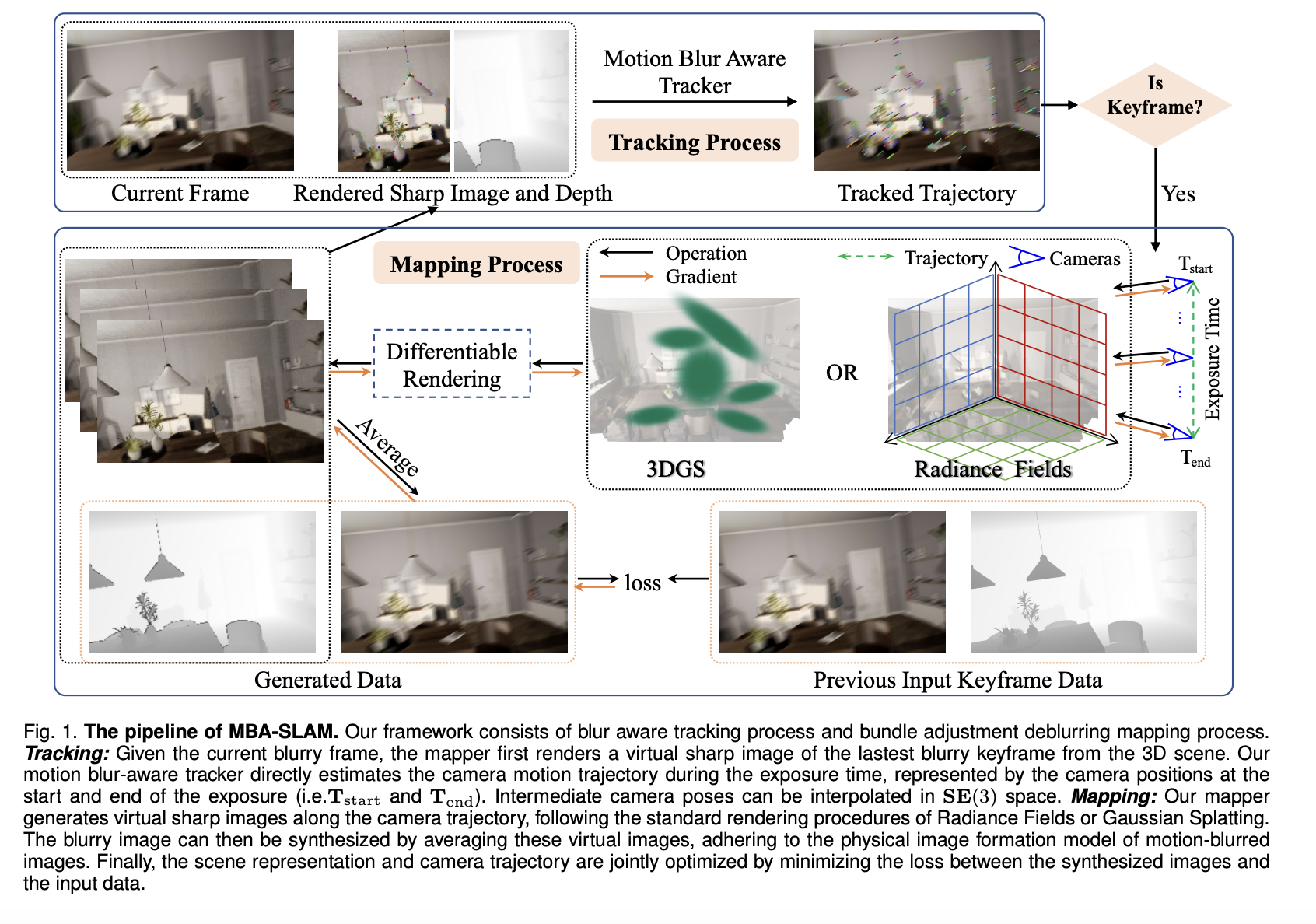
A research team from China developed MBA-SLAM, a photo-realistic dense RGB-D SLAM pipeline that effectively manages motion-blurred inputs. This innovative solution incorporates the physical motion blur imaging process into both tracking and mapping stages.
Key Features of MBA-SLAM:
- Motion Blur-Aware Tracker: Uses a continuous motion model to track camera movement during exposure.
- Bundle-Adjusted Deblur Mapper: Enhances mapping accuracy by optimizing camera trajectories and 3D scenes.
- Scene Representations: Explores both NeRF and 3D Gaussian Splatting for optimal performance.
Performance and Results
MBA-SLAM significantly reduces tracking errors, achieving:
- ATE RMSE: 0.053 on the ScanNet dataset, outperforming ORB-SLAM3 and LDS-SLAM.
- Image Quality: PSNR of 31.2 dB on the ArchViz dataset, with SSIM of 0.96 on ScanNet.
- Speed: 5 times faster than other methods due to CUDA acceleration.
Conclusion
The MBA-SLAM framework effectively addresses SLAM system challenges. With its advanced motion blur model and optimized components, it delivers accurate camera motion tracking and high-quality 3D map reconstruction. This advancement paves the way for future research and applications in dynamic environments.
Stay Connected
Check out the Paper and GitHub. Follow us on Twitter, join our Telegram Channel, and connect on LinkedIn. If you enjoy our work, subscribe to our newsletter and join our 55k+ ML SubReddit.
Transform Your Business with AI
Utilize MBA-SLAM to enhance your operations:
- Identify Automation Opportunities: Find areas for AI to improve customer interactions.
- Define KPIs: Measure the impact of your AI initiatives on business outcomes.
- Select an AI Solution: Choose tools that fit your needs and allow customization.
- Implement Gradually: Start small, gather data, and expand AI usage wisely.
For AI KPI management advice, reach out to us at hello@itinai.com. Stay updated on AI insights via Telegram and Twitter.

























