
NVIDIA AI Introduces HOVER: A Revolutionary AI for Humanoid Robotics
The field of robotics has made significant strides, particularly in the development of humanoid robots capable of performing complex tasks in various environments. These robots are envisioned to assist in areas such as surgical procedures, construction, disaster response, and collaborative work in factories and homes. However, achieving true versatility in humanoid robotics has been a challenge, until now.
Understanding the Limitations of Current Humanoid Robotics
Humanoid robots, while versatile, often face a critical challenge known as the “control conundrum.” This issue arises from their specialization in specific tasks. For example, a robot may excel at performing a backflip but struggle with simpler tasks like opening a door. This is due to the fragmented control systems currently in use, where different controllers are optimized for distinct functions such as locomotion, manipulation, or teleoperation.
- Locomotion Controllers: Focus on guiding the robot’s movement through space.
- Manipulation Controllers: Allow for precise limb movements.
- Teleoperation Controllers: Enable human operators to control the robot’s actions.
This specialization results in inefficiencies when switching between tasks, limiting the robots’ overall functionality.
Introducing HOVER: A Unified Control Solution
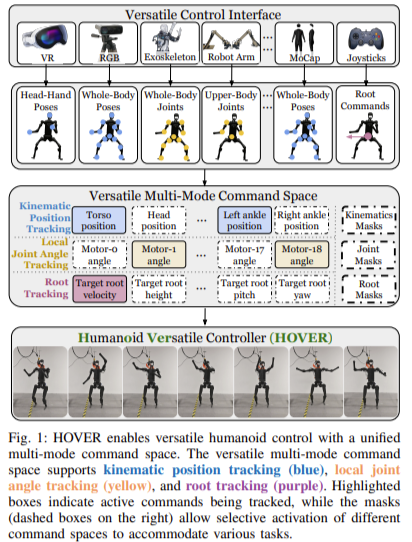
NVIDIA’s HOVER represents a significant advancement in humanoid robotics. It is a unified neural controller that integrates various control strategies into a single cohesive policy. This innovation allows for seamless transitions between different control modes, enhancing the robot’s versatility. HOVER supports over 15 configurations tailored for real-world applications, making it a powerful tool for diverse tasks.
Learning from Human Movement
The effectiveness of HOVER is rooted in its ability to learn from human motion. By utilizing a vast dataset of human motion capture data, HOVER develops an understanding of balance, coordination, and efficient movement. This foundation enables the robot to adapt and perform tasks with human-like precision.
Policy Distillation: The Key to Versatility
The concept of policy distillation is central to HOVER’s functionality. An “oracle policy,” which serves as a master imitator, transfers its skills to HOVER through a structured learning process. This method allows HOVER to handle various control modes effectively, outperforming traditional, specialized policies.
Proven Performance: HOVER in Action
HOVER’s capabilities have been rigorously tested against specialized controllers. In both simulated and real-world environments, HOVER consistently outperformed its competitors across multiple metrics. For instance, it demonstrated superior generalization, excelling in at least 7 out of 12 performance metrics compared to specialized controllers.
Real-World Applications
The real-world validation of HOVER’s performance was conducted on the Unitree H1, a 19-DOF humanoid robot. HOVER successfully tracked complex motions and transitioned smoothly between different control modes, showcasing its effectiveness in practical scenarios.
The Future of Humanoid Robotics
HOVER paves the way for the future of humanoid robotics, unlocking vast potential for applications across various industries. Imagine humanoid robots that can:
- Perform surgical procedures with unmatched precision.
- Construct intricate structures with human-like dexterity.
- Respond to emergencies with agility.
- Collaborate seamlessly with humans in various settings.
The advent of truly versatile and intelligent humanoids is approaching, and HOVER is at the forefront of this transformation.
Conclusion
In summary, NVIDIA’s HOVER represents a groundbreaking step in humanoid robotics, combining the advantages of multiple control strategies into a single, efficient framework. Its ability to learn from human movement and adapt to various tasks positions it as a leader in the field. As we move towards a future where humanoid robots become integral to our daily lives, HOVER is set to redefine the boundaries of what robots can achieve.

























