
Transforming Robotic Manipulation with GRAPE
Overview of Vision-Language-Action Models
The field of robotic manipulation is changing rapidly with the introduction of vision-language-action (VLA) models. These models can perform complex tasks in various settings. However, they struggle to adapt to new objects and environments.
Challenges with Current Training Methods
Current training methods, especially supervised fine-tuning (SFT), mainly focus on imitating successful actions. This limits the models’ understanding of tasks and their ability to handle unexpected situations. There is a clear need for better training strategies.
Previous Approaches in Robotic Learning
Earlier robotic learning methods used hierarchical planning. Models like Code as Policies and EmbodiedGPT created action plans using large language models. However, these methods have limitations in adapting skills to everyday tasks.
Innovative Action Planning Approaches
VLA models have explored two main action planning methods: action space discretization and diffusion models. While these methods attempt to improve action sequence generation, they still rely on supervised training, which restricts their ability to generalize to new tasks.
Introducing GRAPE
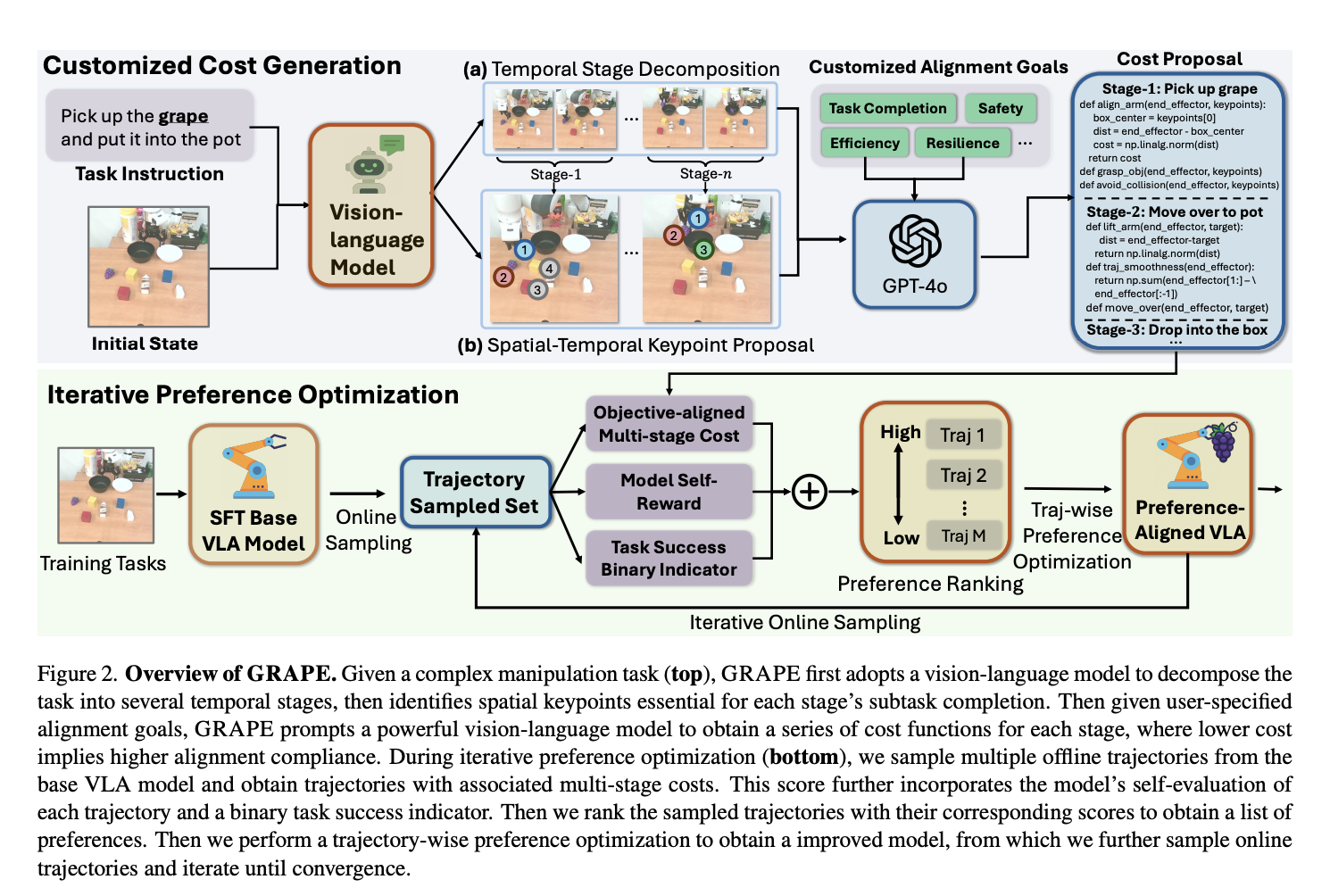
Researchers from UNC Chapel-Hill, the University of Washington, and the University of Chicago have developed GRAPE (Generalizing Robot Policy via Preference Alignment). This new approach improves VLA model training by optimizing robotic policies based on both successful and unsuccessful trials.
Key Features of GRAPE
GRAPE breaks down complex tasks into manageable stages, using a large vision model to identify important keypoints. This allows for flexibility in meeting various objectives, such as safety and efficiency, which is a significant leap forward in robotic policy development.
Performance Validation
GRAPE has been rigorously tested in both simulations and real-world environments. In simulations, it outperformed existing models by significant margins. In real-world tasks, GRAPE achieved a 67.5% success rate, showing a 22.5% improvement over previous models.
Conclusion: The Future of Robotic Manipulation
GRAPE addresses major challenges faced by VLA models, enhancing their adaptability and generalizability. This innovative approach allows for better alignment of robotic policies with diverse goals. The promising results from experiments highlight GRAPE’s potential to revolutionize robotic manipulation.
Get Involved
Check out the Paper and GitHub Page. Follow us on Twitter, join our Telegram Channel, and connect with our LinkedIn Group. If you appreciate our work, consider subscribing to our newsletter and joining our 60k+ ML SubReddit.
Elevate Your Business with AI
To stay competitive, consider implementing GRAPE: A Plug-and-Play Algorithm for generalizing robot policies. Discover how AI can transform your operations:
- Identify Automation Opportunities: Find areas in customer interactions that can benefit from AI.
- Define KPIs: Ensure your AI projects have measurable impacts.
- Select an AI Solution: Choose tools that fit your needs and allow customization.
- Implement Gradually: Start with a pilot project, collect data, and expand wisely.
For AI KPI management advice, reach out to us at hello@itinai.com. For ongoing insights into leveraging AI, follow us on Telegram or @itinaicom.
Explore how AI can redefine your sales processes and customer engagement at itinai.com.























