
Deep Patch Visual (DPV) SLAM: A New Artificial Intelligence AI Method for Monocular Visual SLAM on a Single GPU
Practical Solutions and Value
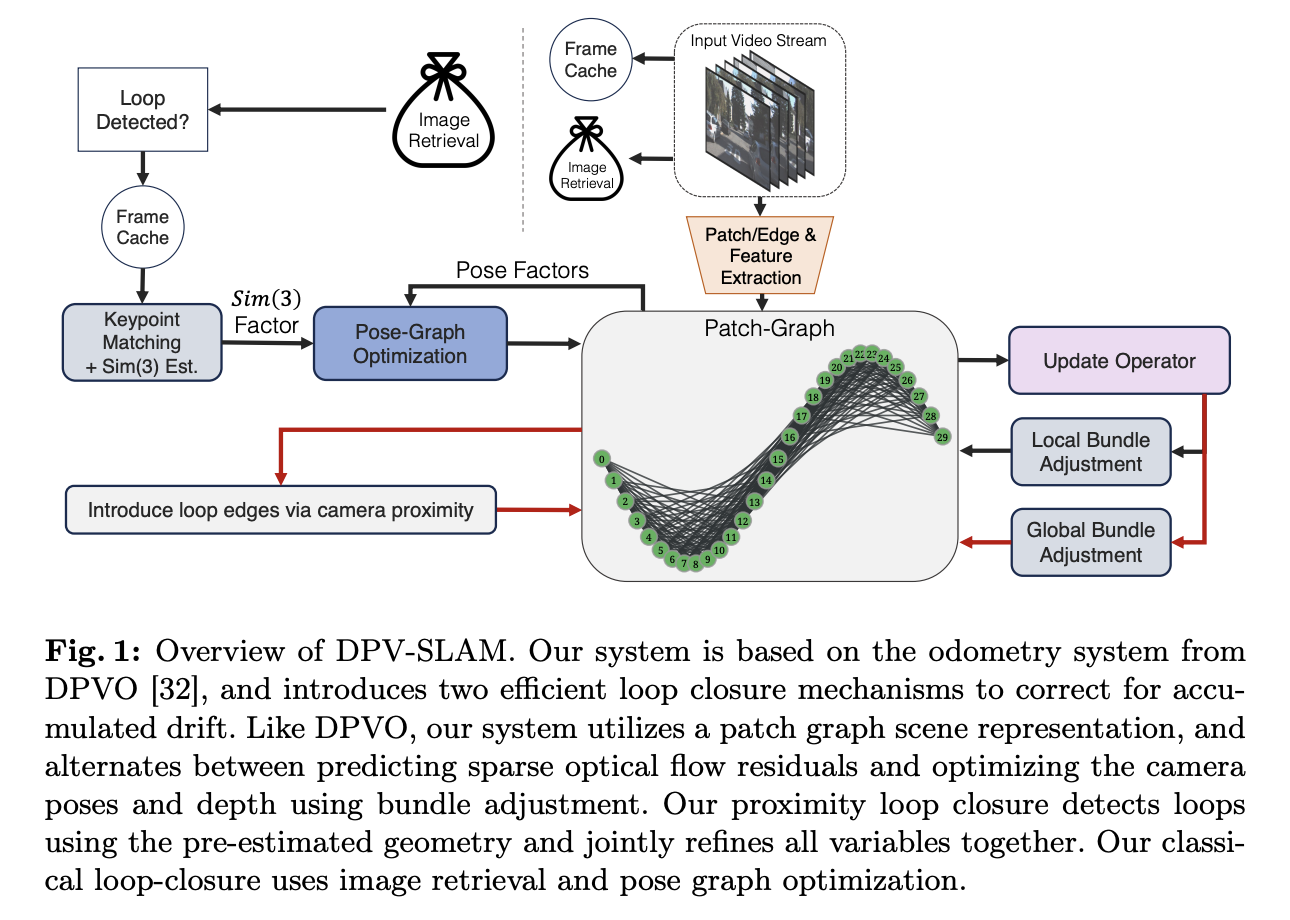
Visual Simultaneous Localization and Mapping (SLAM) is crucial for robotics and computer vision, enabling real-time state estimation for various applications. However, existing SLAM solutions face challenges in achieving high tracking accuracy and demanding computational power. DPV-SLAM, an extension of the DPVO odometry system, addresses these limitations by introducing efficient mechanisms for loop closure and drift correction. It outperforms traditional methods across various datasets, showcasing enhancements in accuracy, speed, and robustness.
DPV-SLAM offers practical solutions for correcting drift, including the proximity loop closure and classical loop closure mechanisms. It achieves impressive performance across different datasets, outperforming traditional approaches while utilizing efficient computational resources and frame rates. Although it requires a GPU and provides sparse 3D reconstruction, its overall performance and efficiency make it valuable for the computer vision field.
For companies looking to evolve with AI, DPV-SLAM presents an opportunity to stay competitive and redefine their way of work. It provides practical solutions for identifying automation opportunities, defining KPIs, selecting AI tools, and implementing AI usage gradually, ensuring measurable impacts on business outcomes.
For AI KPI management advice and insights into leveraging AI, connect with us at hello@itinai.com or stay tuned on our Telegram t.me/itinainews or Twitter @itinaicom.
Discover how AI can redefine sales processes and customer engagement at itinai.com.























