Challenges in Household Robotics
Household robots face difficulties in organizing tasks, like putting groceries in a fridge. They must consider user preferences and physical limitations while avoiding collisions. Although Large Language Models (LLMs) allow users to express their needs, it can be tedious and time-consuming. Vision-Language Models (VLMs) can learn from user actions but struggle with two main issues: understanding unique preferences from limited examples and translating abstract preferences into practical actions.
Current Solutions and Their Limitations
Current methods to tackle these challenges fall into two categories: active preference learning and LLM-based planning systems. Active preference learning often uses comparative questions to understand user needs but can be inefficient for complex tasks. Planning systems, like interactive task planners, lack strong feedback mechanisms for refining user preferences. Additionally, some methods that measure uncertainty need large datasets, which are hard to gather in home settings.
Introducing APRICOT
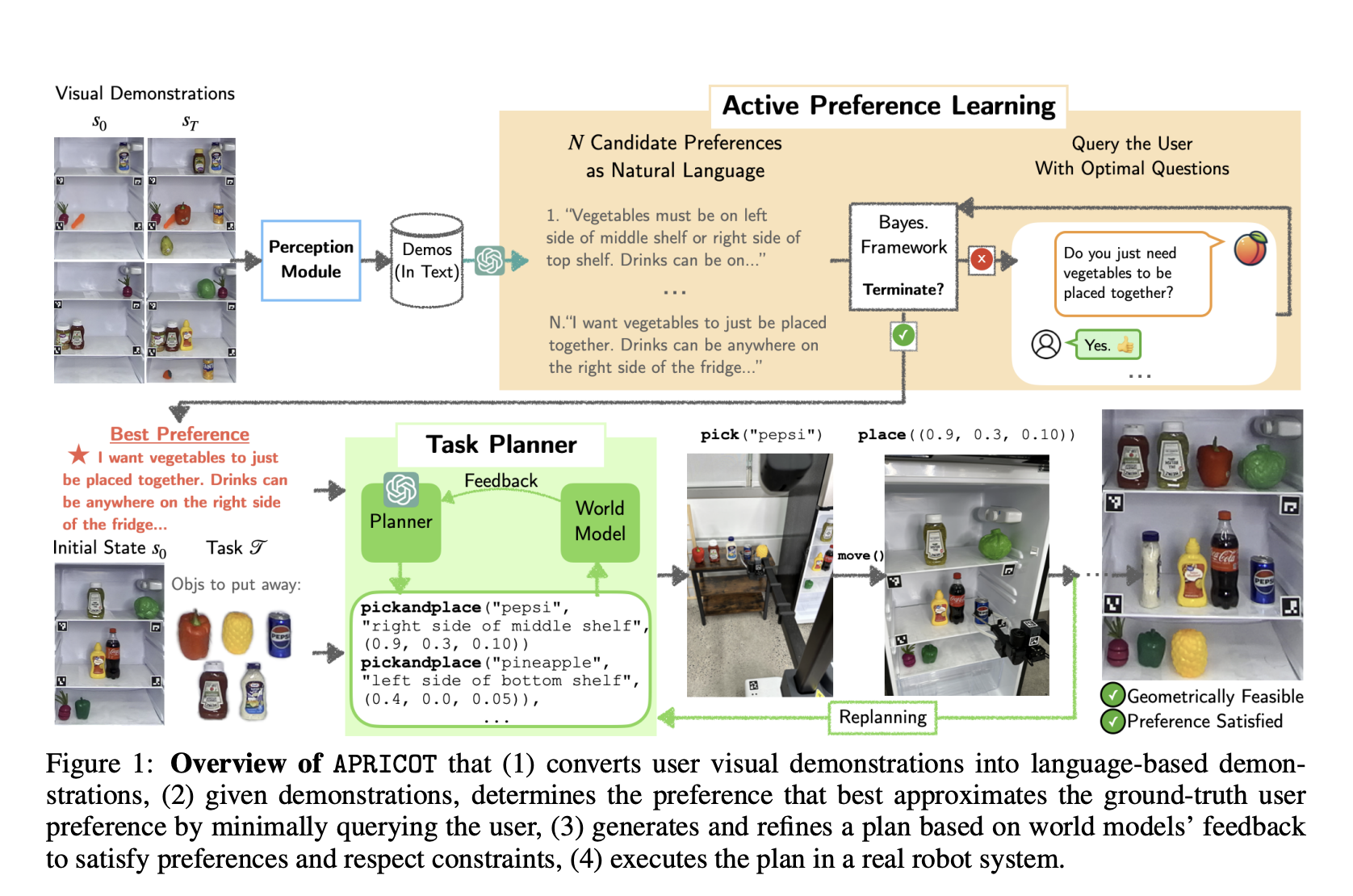
Researchers from Cornell and Stanford have developed APRICOT (Active Preference Learning with Constraint-Aware Task Planner), a solution that bridges the gap between understanding preferences and executing tasks. APRICOT combines four main components:
- Vision-Language Model: Converts visual demonstrations into language instructions.
- Bayesian Active Preference Learning: Identifies user preferences through targeted questions.
- Constraint-Aware Task Planner: Creates executable plans that consider user preferences and physical limitations.
- Robotic System: Implements the solution in real-world scenarios.
This approach minimizes user input while ensuring high accuracy and has been tested across various preferences and real-life situations.
APRICOT’s Three-Stage Process
APRICOT operates in three stages:
- Preference Learning: Uses a Bayesian model to refine user preferences based on visual demonstrations.
- Task Planning: Generates and refines plans using LLMs and geometric models, incorporating user feedback.
- Execution: Employs advanced perception systems for object detection and translates commands into actions.
Performance and Results
APRICOT has shown impressive results:
- Accuracy: 58.0% in preference learning, outperforming other methods.
- User Interaction: Requires 71.9% fewer queries than competing systems.
- Feasibility: 96.0% of plans were executable in constrained environments.
- Adaptability: Maintains performance in changing conditions.
Conclusion
APRICOT marks a significant step forward in robotic task execution, effectively merging preference learning with practical planning. While it excels in many areas, it does assume that user preferences fit within predefined categories, which may limit its effectiveness in more complex situations.
Stay Connected
Check out the Paper. All credit for this research goes to the researchers of this project. Follow us on Twitter, join our Telegram Channel, and connect with our LinkedIn Group. If you appreciate our work, subscribe to our newsletter and join our 55k+ ML SubReddit.
Explore AI Solutions
To enhance your business with AI, consider these steps:
- Identify Automation Opportunities: Find areas in customer interactions that can benefit from AI.
- Define KPIs: Ensure measurable impacts from your AI initiatives.
- Select an AI Solution: Choose tools that meet your needs and can be customized.
- Implement Gradually: Start small, gather data, and expand wisely.
For AI KPI management advice, contact us at hello@itinai.com. For ongoing insights, follow us on Telegram or Twitter.
























