
Challenges in Robotic Learning
Building effective robotic policies is challenging. It requires specific data for each robot, task, and environment, and these policies often don’t work well in different settings. Recent advancements in open-source data collection allow for pre-training on diverse, high-quality data. However, the variety in robots’ physical forms, sensors, and environments complicates this process.
Importance of Proprioception and Vision
For complex tasks, both proprioception (body awareness) and vision are crucial. If these are poorly learned, robots may overfit, meaning they repeat actions for specific tasks or environments.
Current Learning Methods
Currently, robotic learning involves gathering data from a single robot for a specific task, which limits the model’s ability to adapt to new tasks or robots. Techniques like pre-training and transfer learning from fields like computer vision help models learn better. However, robotics faces challenges due to less data diversity and more heterogeneity.
Introducing Heterogeneous Pre-trained Transformers (HPT)
A team from MIT CSAIL and Meta has developed a framework called HPT. This architecture allows robots to learn from diverse data sources, creating a shared understanding of tasks that can be applied across different robots and conditions. Instead of starting from scratch for each task, HPT enables faster and more efficient training by utilizing pre-learned knowledge.
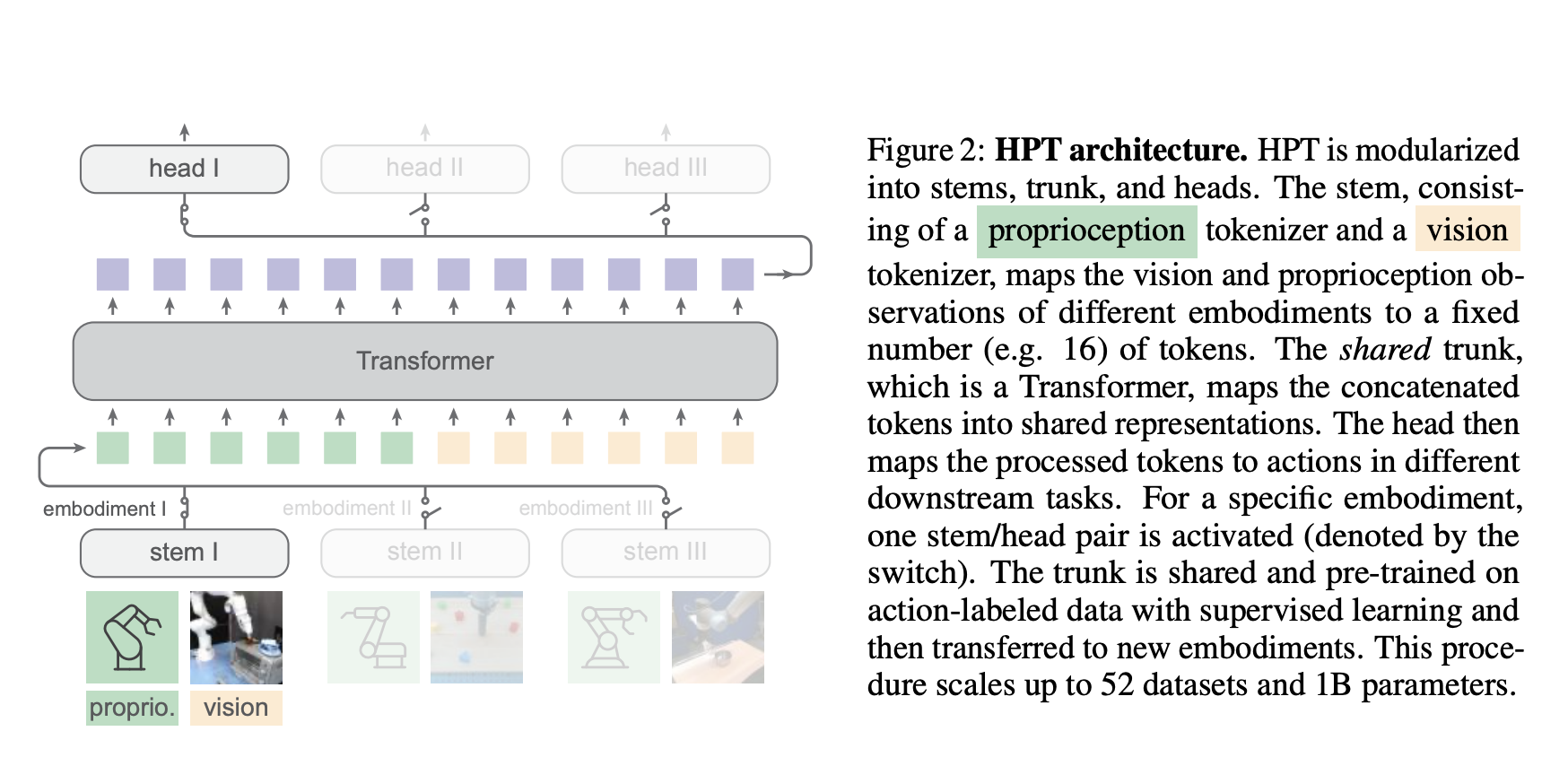
How HPT Works
The HPT architecture includes:
- Embodiment-specific stem: Combines sensor inputs like camera views and body movements.
- Shared trunk: A pre-trained model that adapts to new tasks and robots.
- Task-specific heads: Produces action outputs for specific tasks.
Results and Benefits
HPT was tested with over 50 data sources and a model size exceeding 1 billion parameters. It effectively integrates data from real robots, simulations, and human videos. The results show that HPT significantly improves performance, enhancing fine-tuned policies by over 20% on unseen tasks.
Conclusion
The HPT framework effectively addresses the challenges of robotic learning by leveraging pre-trained models. It shows notable improvements in generalization and performance across various tasks. While pre-training may take time, this approach can inspire future advancements in handling diverse robotic data.
Stay Connected
Check out the Paper, Project, and MIT Blog. Follow us on Twitter, join our Telegram Channel, and connect with our LinkedIn Group. If you enjoy our work, subscribe to our newsletter and join our 55k+ ML SubReddit.
Explore AI Solutions
To evolve your company with AI and stay competitive, consider the following:
- Identify Automation Opportunities: Find key areas for AI implementation.
- Define KPIs: Ensure measurable impacts on business outcomes.
- Select an AI Solution: Choose tools that fit your needs.
- Implement Gradually: Start small, gather data, and expand wisely.
For AI KPI management advice, contact us at hello@itinai.com. For ongoing insights, follow us on Telegram or @itinaicom.
Transform Your Sales and Customer Engagement
Discover how AI can redefine your business processes. Explore solutions at itinai.com.
























